Ctrl-P: Control Pressure (v2.0)
By Clark Teeple
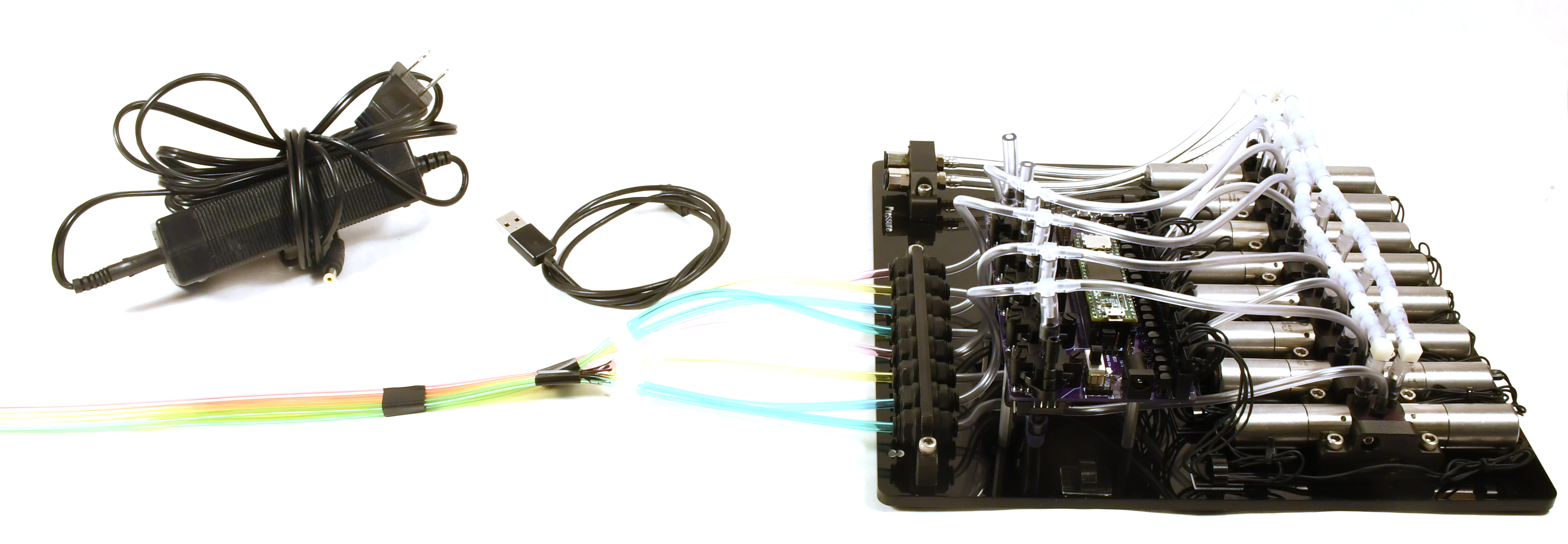
A custom pneumatic control system featuring smooth control of pressure at a high bandwidth.
This work was done as part of a research project at the Harvard Microrobotics Lab. Our goal was to build a system capable of smooth control of pressure to drive our custom soft robotic hands.
Publications using this system:
-
“A Dexterous Soft Robotic Hand for Delicate In-Hand Manipulation,” S. Abondance, C.B. Teeple, and R.J. Wood, IEEE Robotics and Automation Letters, 2020
-
“Multi-Segment Soft Robotic Fingers Enable Robust Precision Grasping,” C.B. Teeple, T.N. Koutros, M.A. Graule, and R.J. Wood, International Journal of Robotics Research, 2020
-
“Ultragentle Manipulation of Delicate Structures using a Soft Robotic Gripper,” N.R. Sinatra, C.B. Teeple, D.M. Vogt, K.K. Parker, D.F. Gruber, and R.J. Wood, Science Robotics, 2019 (uses a version modified for use with water pressure)